Vex Robotics Wins Regional Tournament, Progresses to State
Underdogs C team and G team make their way to semifinals at Crown Point’s state qualifying tournament

February 16, 2023
Crown Point Vex Robotics club saw two of the Underdogs teams win semifinals at Crown Point High School’s state qualifying tournament on Jan. 21. These teams competed among 68 others in qualifier matches to progress into the bracketed elimination rounds.
“During the qualifications, we were kinda, iffy. We all kind of came through in the end,” member of G team sophomore Brianna Johnson said.
While these teams are from the same school, all 10 teams of the Underdogs competed individually with another assigned allied team, often from a different school, during the qualifier matches. The winning semifinalists, C team and G team, did not ally until the elimination rounds, when the top scoring 16 teams from qualifiers were able to pick their new ally. With C team ranking second, they weighed their options with G team and another Underdogs team, W team.
“Before we were going to alliance with [W team], our idea was to go with G team. We ended up expressing to the G team that we weren’t going to pick them. And then after W said that, essentially, they weren’t going to accept if we picked them, then we started talking to G team,” member of C team freshman Reiter said, “I want to say it was like a 20 minute talk in the

hallway where we essentially decided that we were going to choose them for alliance.”
“One of the things that made it weirder for C team was the fact that whoever C team went with, they were probably going to have a high possibility of winning the tournament,” member of G team senior Hannah Flewelling said, “It was just who they wanted to go with.”
Johnson also explained that choosing a team that rejects the alliance would allow that team to ask one of the top 16 for an alliance, making this an important decision. After being allied with C team, Flewelling noted the symmetry in their game strategy helped with their cooperation in the elimination rounds.
“Once we came together as an alliance, we both had similar match strategies during the qualification rounds, so we were able to play those out during elimination rounds. We would typically both be playing offense till the last 30 seconds of the match where we’d switch and start playing defense,” Flewelling said.
“However, when there was malfunction with either of our bots, we would automatically switch to [defensive] because we didn’t want to risk the chance of something going wrong,” Reiter said.
“For example, during our quarterfinal match, our drivetrain stopped working, so we were driving with half drive, so C team switched to a mainly offensive role while we started playing more of a defensive role,” Flewelling said.
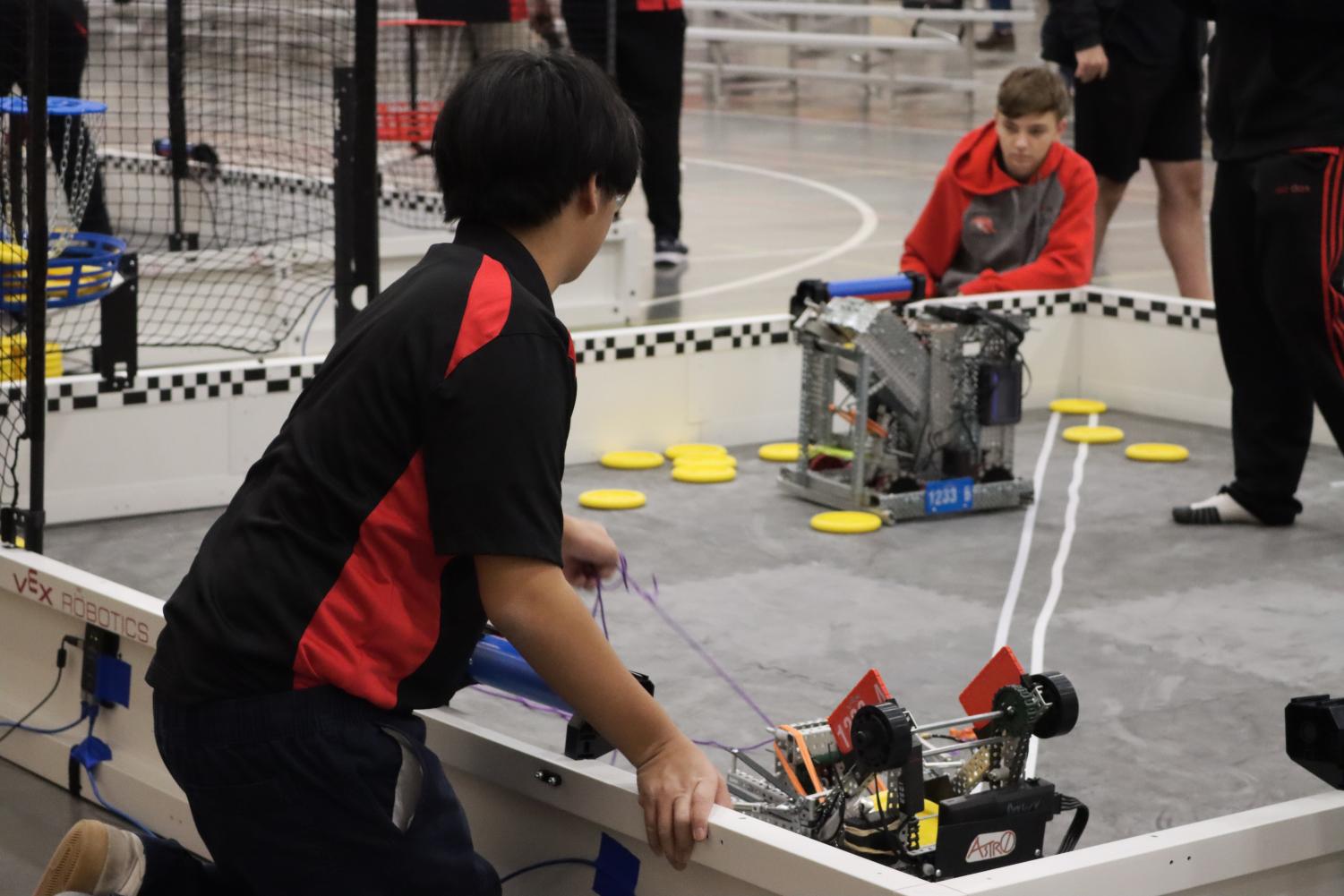
All matches were split into two segments: an autonomous period, when only pre-programed actions control the robot, and a driver period, when the driver takes control of the robot. Each period has the teams competing to get the highest score by shooting frisbees into their high or low goal on opposite corners and switching rollers to their team color on the other opposing corners. During the final 10 seconds of the driver period, the driver can launch their “expansion”, a tethered projectile shot from the robot, that scores a point per tile the expansion and robot touch. There is a risk in launching, though, as member of G team junior Macy Achtzehn said that G team got disqualified “a couple of times” for having their expansion go outside of the match field.

C team was able to get through qualifiers with them contributing a big part in each win.
“C team did really well during our qualification matches, we ended up going [since] we won every single match and we had the highest CCWM, which stands for calculated contribution to win margin. Essentially, we were a major part in the amount of points scored in each of our matches,” Reiter said
C team and G team would go on to win the semifinal against W team and a team from Portage. With their victory, G team finds relief in knowing their entry into the state tournament is assured.
“I feel a relief because, till this point, we were working to get to state and now we’re here and it’s just like ‘Okay, we don’t really have to stress anymore,’” Achtzehn said.
“It’s more of a long term goal now of what we want to fix by state,” Flewelling said, “Maybe our robot’s not going to be quite where we want it at a regional tournament now, but we’ll be working towards the state goal instead.”
For this purpose and for proof of design, Flewelling said that their engineering design notebooks help to record the problems at tournaments as well as the process of improving their robot.
“Just having a notebook shows you researched it, and you built it and you document that whole process,” Achtzehn said.
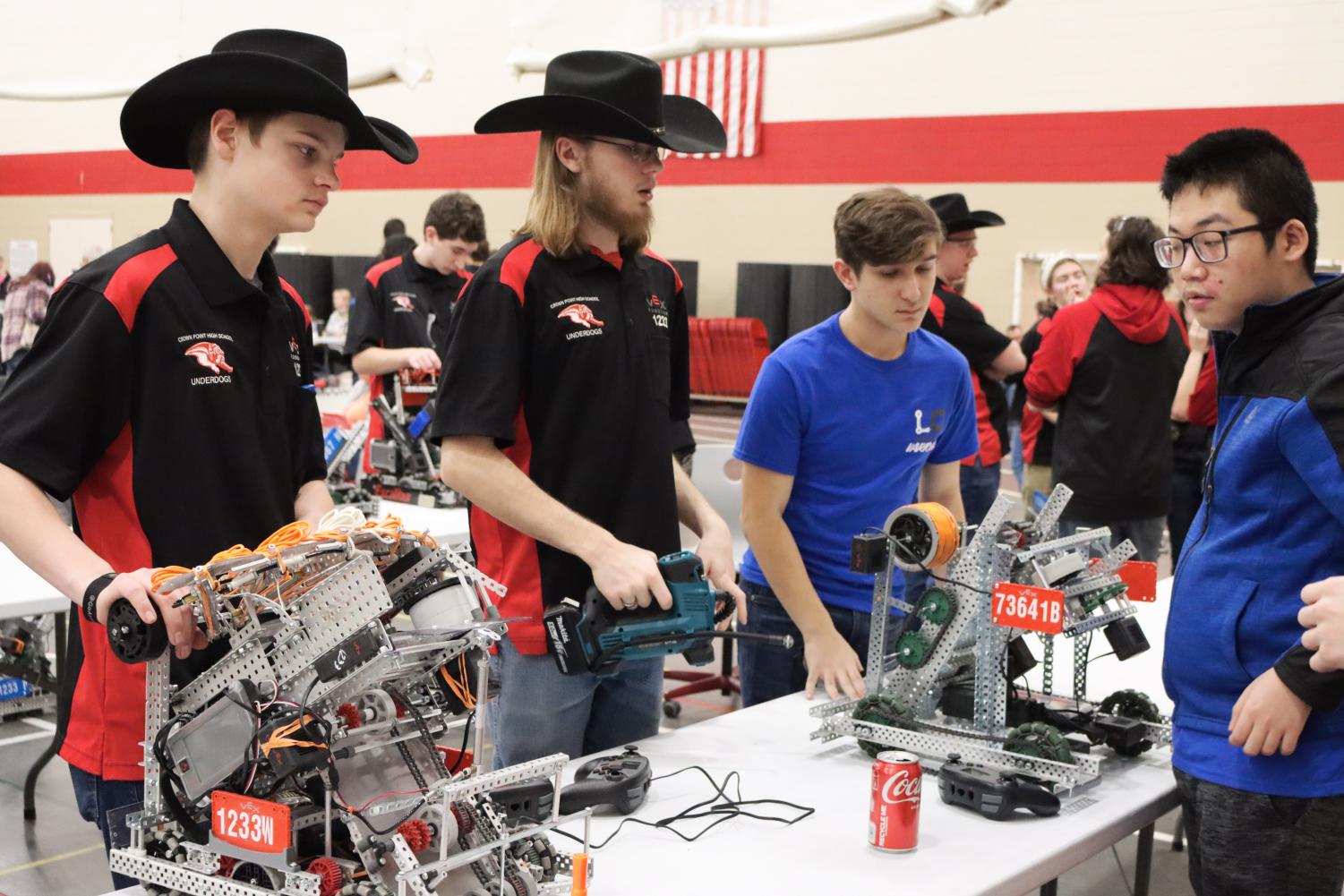
Although each robot differs in design from team to team, C team and G team explained that there tends to be a common build, the “meta bot”, that most teams incorporate.
“The meta bot is what you’re going to see in a specific region that tends to do the best. In our region of competition, it’s a flywheel that shoots the discs with some sort of expansion on top,” Flewelling said, “When you are in a specific area, you see more of the meta bot whereas when you get to venture out to other places like Indianapolis, or up to Wisconsin, like we’re going to be doing soon, we get to see different bots.”
Reiter speculates that the meta bot for the state tournament would include an expansion on top as well as having their intake and shooter on the front of the robot.
“It’s a driver preference. And it can make your shooting much more rapid simply because you don’t have to waste time turning to shoot,” Reiter said.
Johnson added that Indiana is one of the most competitive states when it comes to Vex robotics competitions.

“If you take the top teams from Indiana and put them on to the world scale, there is almost always an Indiana robot in the semifinals or finals at the World Championship,” Flewelling said.
During a pre-tournament interview, Reiter described C team’s robot as “I’ll be quite honest, janky. It was very swiftly designed, but it works extremely well for a nearly all freshman team.”
“I believe we’re on design seven. And we did this design specifically over the past two weeks. And there were a lot of issues,” Reiter said, “we had to redo our intake several times, the thing that [loads frisbees into the robot,] due to the fact that it wasn’t gaining enough traction on the disk to actually pull them into our bot. But we eventually decided to change the design entirely.”
While G team and C team were able to alliance with another Underdogs team, the same could not be said for B team, who remained allied with a portage team through to the elimination rounds. Member of B team freshman Eli Stoelb said that while having nine other teams makes it more likely to get allied to another Underdogs team, it all depends on who gets chosen out of the queue.
“A lot of our teams go with our own team because we know what we’re capable of, we see our robots working in the field here,” member of B team sophomore Danny Dillman said.
Despite coming from different schools, Dillman said that working with an outside team had a mutual benefit in connecting the teams and learning from each other.
Seeing one of their teams win, member of B team senior Austin Farrier has mixed feelings on the outcome.
“I’m glad because it’s kind of like, represent, but it’s also kind of like, ‘dang, we could have been up there,’” Farrier said.
Click here for a video explanation of both C team’s and G team’s robots.









Follow us on Twitter and Instagram for updates on future articles!